
Sprint Progression
*More information included in subsections
1
Sprint 1
Decide on drivetrain and suction method
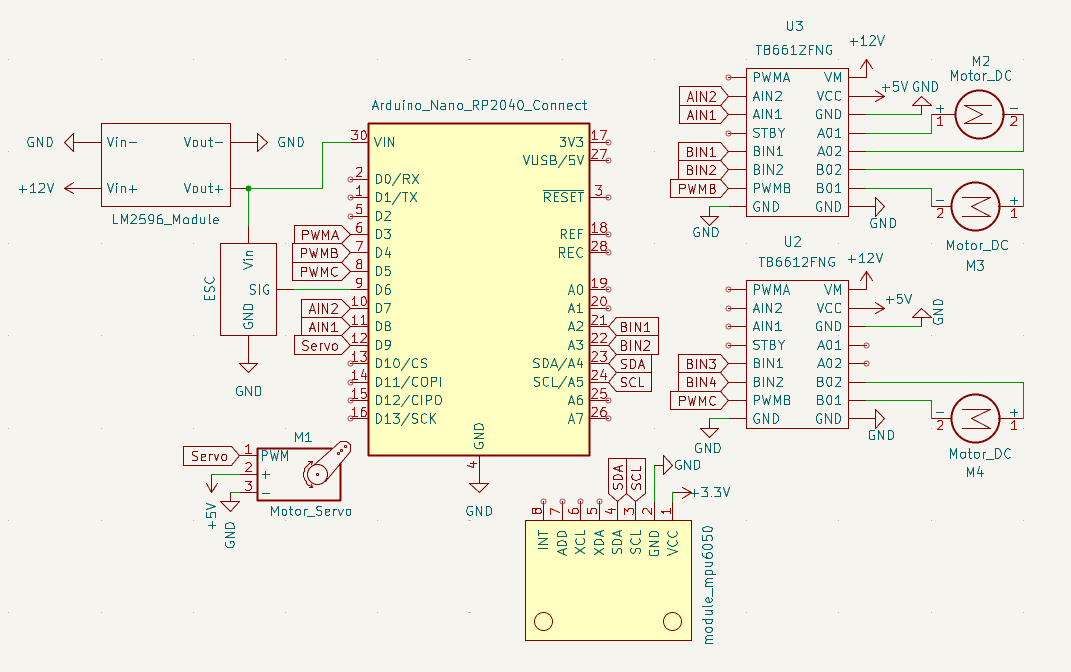
Component selection, PCB schematic
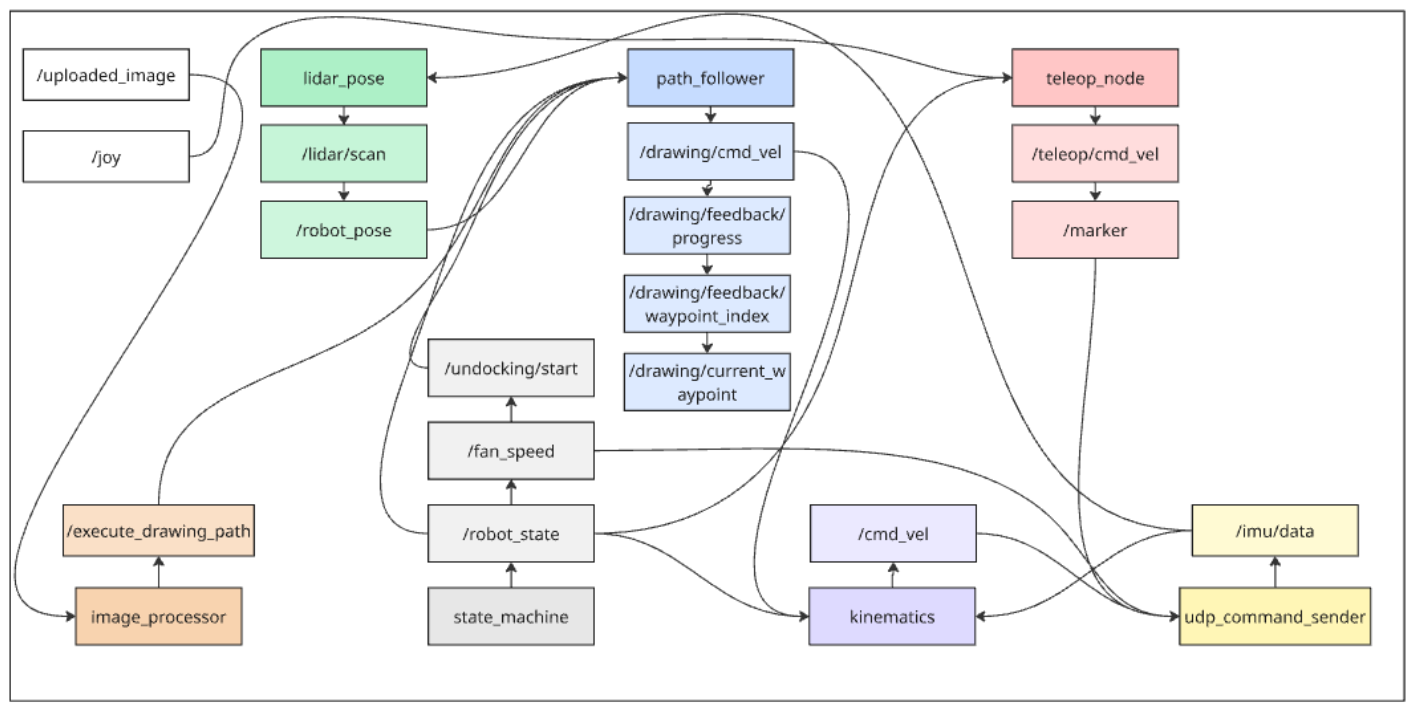
Path following, software architecture and Arduino firmware
2
Sprint 2
Path following, software architecture and arduino firmware
Mechanical Optimization
PCB layout
3
Sprint 3
Impeller optimization
Robot localization
Full integration/cleanup